Summary Chapter 11- Rectilinear Motion
Vocabulary/Concepts List
- force
- mass
- time
- space
- mechanics
- particle
- rigid body
- statics
- dynamics
- kinematics
- kinetics
- translation
- rotation
- reference frame
- Newtonian frame / absolute frame / inertial frame / fixed frame
- rectilinear motion
- position coordinate
- velocity (average
and instantaneous)
- speed
- acceleration
(average and instantaneous)
- uniform rectilinear motion
- uniformly
accelerated rectilinear motion
- positive acceleration, negative acceleration
- true
acceleration, deceleration
- relative motion
- dependant motion
- degrees of freedom of
a system
- curvilinear motion
(2D & 3D)
- position vector
- velocity vector
- acceleration vector
- vector functions
- derivatives of vector functions
- projectile motion
- motion curves
- hodograph
- x / y / z coordinate system
- x / y /z components
- osculating plane
- tangential / normal / binormal coordinate system
- tangential / normal
/ binormal components
- radial / transverse / axial coordinate system
- radial / transverse
/ axial components
Rectilinear Motion
In rectilinear motion the motion of a particle is along a straight path, or a line.
Hence, the position of the particle can be identified solely with a scalar value called the position coordinate, x.
This position coordinate, x, is the distance from a reference point chosen on the the line (i.e. the path of motion.)
The kinematic relationships for rectilinear motion:
|
v = dx/dt a = dv/dt a = d2x /dt2 a = v dv/dx |
A positive or negative value of x indicates on which side of the reference point the body is at.
A positive or negative value of v indicates in which direction the particle is moving.
A positive or negative value of a each indicates one of two possible cases:
-or-
2) the particle traveling in the negative direction AND it is decreasing in speed
-or-
2) the particle traveling in the negative direction AND it is increasing in speed
A Special Case of Rectilinear Motion:
Uniform Rectilinear Motion
Uniform rectilinear motion is when the acceleration is zero.
The kinematic relationships for uniform rectilinear motion:
|
a = 0 v = vo = constant |
Another Special Case of Rectilinear Motion:
Uniformly Accelerated Rectilinear Motion
Uniformly accelerated rectilinear motion is when the acceleration is constant.
The kinematic relationships for uniformly accelerated rectilinear motion:
|
v = vo + at x = xo + vot + ½ a t2 v2 = vo2 + 2 a (x - xo) |
Relative Rectilinear Motion
Consider two particles, A and B, moving in
rectilinear motion.
xB/A
= xB - xA = the position of B relative to A (The vector
goes from A to B)
vB/A
= vB - vA = the velocity of B relative to A
aB/A
= aB - aA = the acceleration of B relative to A
In curvilinear motion the motion of a particle is along a 2-dimensional or a 3-dimensional path, or curve.
Hence, the position of the particle must be identified with a 2-dimensional or a 3-dimensional vector called the position vector, r.
This position vector, r, is the displacement vector from the origin of a frame of reference.
The kinematic relationships for curvilinear motion:
|
r = ? v = dr/dt |
Since these are vector quantities, we need to know how to take the derivative of vector functions:
|
d(P + Q)/du = dP/du + dQ/du d(fP) /du = df/du
P + f dP/du d(P · Q)/du = dP/du · Q + P · dQ/du d(PxQ) = dP/du x Q + P x dQ/du |
Projectile Motion
Projectile motion is the motion of a particle in which the only force acting on it is the earth’s gravitational field.
The motions in the three coordinate directions are independent and hence can be treated like URM or UARM.
The kinematic relationships for projectile motion:
| x direction: URM | y direction: UARM | z direction: URM |
| ax = 0 | ay = -g | az = 0 |
| vx = vxo = constant | vy = vyo - gt | vz = vzo = constant |
| x = xo + vxot | y = yo + vyot - ½ g t2 | z = zo + vzot |
Relative Curvilinear Motion
Consider
a particle A moving with respect to (wrt) a fixed frame Oxyz.
Consider
a frame Ax’y’z’ attached to particle A and moving in translation ONLY wrt Oxyz.
The
relative motion of a particle B moving wrt the frame Ax’y’z’ can be
written as:
rB/A
= rB - rA = the position of B
relative to a frame attached to A
vB/A
= vB - vA = the velocity of B
relative to a frame attached to A
aB/A
= aB - aA = the acceleration of B
relative to a frame attached to A
NOTE:
These
equations are only valid if the frame Ax’y’z’ is moving in translation only wrt Oxyz.
Position, velocity and acce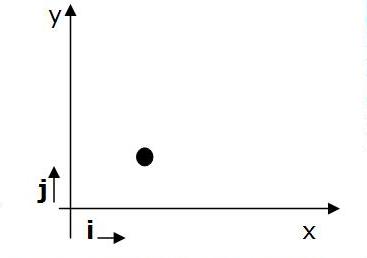 leration vectors represented by
leration vectors represented by
rectangular components
r
= xi + yj +
zk
v
= dx/dt i +dy/dt j + dz/dt k
a
= d2x/dt2
i + d2y/dt2 j + d2z/dt2 k
Where:
- i is the unit vector in the x direction
- j is the unit vector in the y direction
- k is the unit vector in
the z direction (k = i x j)
Note:
Position, velocity and acceleration vectors represented by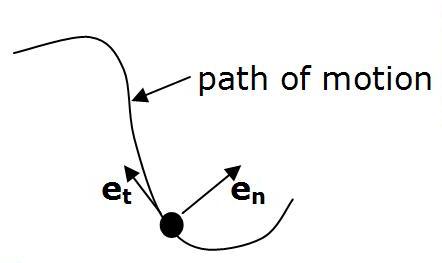
normal and tangential components
v = v et
a = dv/dt et +
v2/pho en
Where:
- et is the unit vector in the tangential direction.
It is the direction of the particle’s velocity.
- en is
the unit vector in the (principle) normal direction.
It is in the osculating plane and directed towards the center of curvature of the path of motion.
- eb is
the unit vector in the binormal direction.
It is the direction is perpendicular to the osculating plane. (eb = et x en )
- rho is the radius of curvature of the path at the point where the particle is at.
Note:
- These components should be used when the path of motion is known.
- These unit vectors change in magnitude and direction as the motion proceeds.
- The normal and binormal components of velocity are always zero.
- The binormal component of the acceleration is always zero.
- at ( = dv/dt) indicates the change in speed
- an ( = v2/rho ) indicates the change in direction
Position, velocity and acceleration v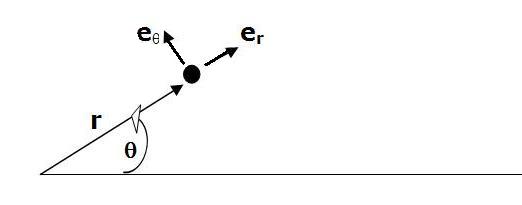 ectors represented by
ectors represented by
radial and transverse components
r = rer
+ zk
v = (dr/dt)
er + (r dq/dt) etheta + (dz/dt)
k
a
= {d2r/dt2 -
r(dq/dt)2} er + {r(d2q/dt2)+2(dr/dt)(dq/dt)} etheta + (d2z/dt2
) k
Where:
- er is the unit vector in the radial direction.
It is the direction the particle would move if r increased and theta remained constant.
- etheta is
the unit vector in the transverse direction.
It is the direction the particle would move if theta increased and r remained constant.
- k is the unit vector in the z direction. (k = er x etheta)
Note:
- These unit vectors change in magnitude and direction as the motion proceeds.
- atheta ≠ dvtheta/dt
- ar ≠ dvr/dt