Chapter 16 - Constrained Motion of a Rigid Body
For some problems involving rigid bodies, we can find a kinematic relationship between the angular acceleration, α, and the linear acceleration of a point on the body, aP.
Centroidal rotation
A wheel rolling about its mass center without slip
A wheel rolling about its mass center without slip
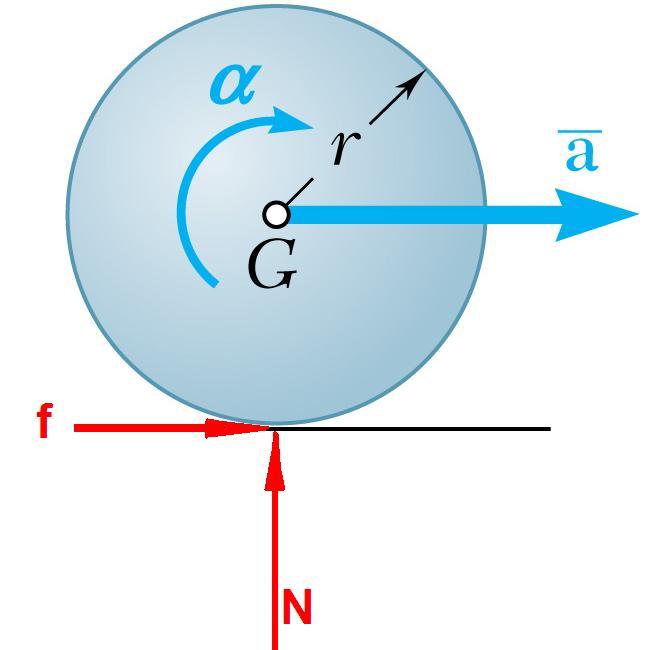
aG = αr
The linear acceleration of any other point on the body can be calculated:aP = aG + aP/G = aG + [α x rP/G] + [ω x (ω x rP/G)]
Also note that the frictional force at the floor will have to be static friction:fs <= μsN
For a wheel rolling with slip there is no relationship between α and aG.
However, the frictional force at the floor will have to be kinetic friction:
fk = μkN
Noncentroidal rotation
A wheel rolling about a point not its mass center without slip
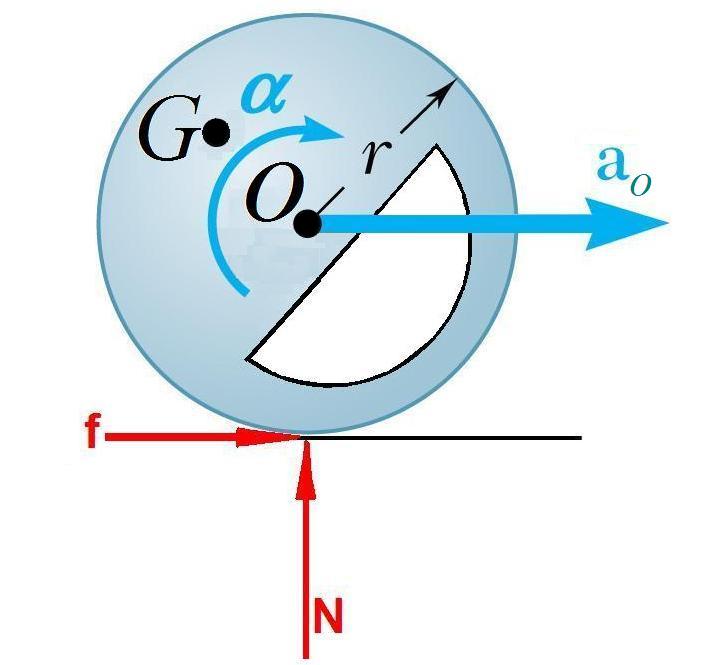
If the geometric center, 0, is not the center of gravity, then it will have this kinematic relationship:
aO = αr
And:aG = aO + aG/O
= aO + aG/Ot + aG/On
= aO + [α x rG/O ] + [ω x (ω x rG/O )]
If there is no rotation of the body about its mass center, then
α = 0
If there is no translation of the body, then
a = 0